
Múltiplos corpos – Eu entendi a referência
Senhores,
Graças a técnica de múltiplos corpos, poderemos ser como o Capitão América no primeiro filme dos vingadores com a frase:
A base do robô
A primeira coisa que deveremos prestar atenção é que o robô possui peças que são interligadas, e uma se encaixa na outra.
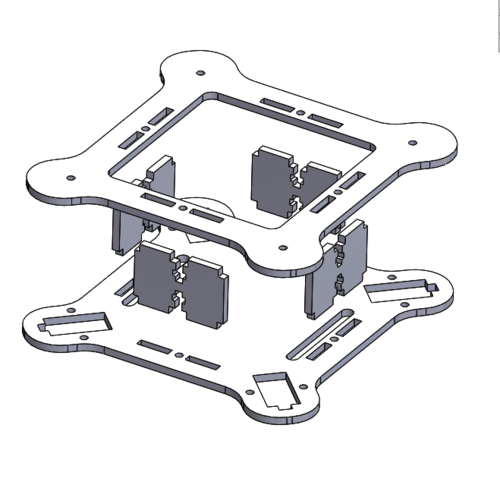
Existem dois tipos de abordagens para a construção das peças:
- Construí-las separadas, sendo uma a uma mas correndo o risco de alterar uma delas em separado e a montagem deixa de estar funcionando
- Criar as peças com alinhamentos e dimensionais em contextos de montagem
Contextos são ótimas ferramentas para trabalho relacional, mas quem não conhece pode realizar uma série de pequenas tragédias em qualquer CAD:
- Quebrar o vínculo por renomear uma das peças definidas no contexto
- Erros por conta de geometrias em peças secundárias
- Falta de operações de atualização dos componentes
Múltiplos corpos
Problemas em links relacionados como os mencionados acima ocorrem em qualquer software do mercado, como o Inventor e o SolidWorks. Se o arquivo do robô fosse só para mim, estaria tudo certo. Porém eu queria que qualquer pessoa conseguisse editar os itens. Com isso eu pensei:
Com isso, contamos com uma única árvore e todos os itens são definidos em sequência.
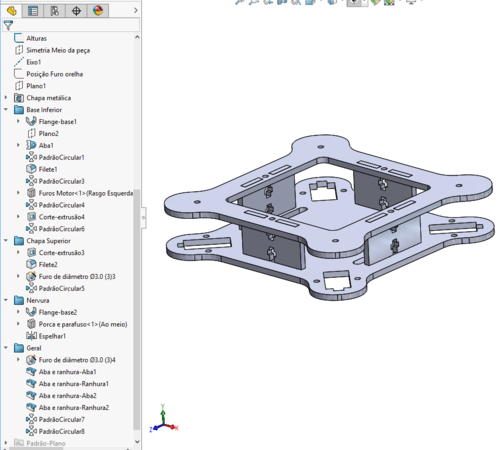
Uma vez que tudo foi feito em um único arquivo, não existem referências para serem perdidas e não contaremos com modelagem em contexto.
Continua depois da publicidade |
Eu preciso cortar tudo
O final do processo vai demandar o corte das chapas em acrílico ou MDF. Daí vem aquela história:
Vejam o “Salvar como” em DWG funciona ao usarmos múltiplos corpos ou chapas.
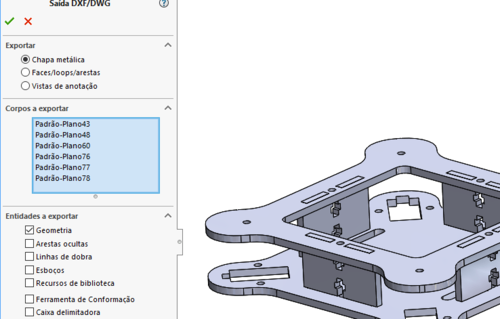
Com isso, eu solicitarei uma única matéria prima, e gero o corte de uma única peça a ser montada.
Problemas
Existem limitações no método, mas para quem quer montar um robô em arduino, teremos uma baita solução.
Download temporário
Para quem deseja entender como eu fiz, vou colocar o link do onedrive com os meus arquivos desenvolvidos no Meped.
Os arquivos estão em SolidWorks 2018.
Sds,
Kastner

Técnico de aplicações da SKA Automação de Engenharias desde setembro de 2004. Trabalhou com diversas Soluções Autodesk, SolidWorks. Nos últimos anos o trabalho tem sido focado na melhoria da comunicação das engenharias com os seus clientes dentro das corporações como a fábrica, administrativo e outros setores.
Mais artigos:
- 11/12 O que as fazendas verticais nos mostram em relação a manufatura aditiva?
- 05/10 8 justificativas técnicas para o processo de gestão de mudanças
- 07/09 Ensino de engenharias e novas demandas de 2020
- 03/08 Os 3 sistemas essenciais para manter uma fábrica em operação
- 01/07 Suporte a projetos de instalações
